説明
AI Robot Tank Kit with Lidar and Camera Fusion, ROS Python Programmable Platform for Research
Robot crawler tank designed for robust field use and flexible development
Why this robot matters
Ready for realworld mapping and remote operation. SLAM lidar plus HD and depth cameras provide reliable perception for navigation, inspection, and research tasks.
Built to perform. torque gear motors and a durable green aluminum alloy oxide body deliver stable motion and a lightweight, longlasting chassis.
Easy to extend and control. A powerful robot expansion board enables advanced sensors and actuators, while Python and ROS support lets developers move from simulation to hardware quickly.
Key benefits at a glance
Precise autonomous navigation: SLAM lidar and camera fusion reduce development time for mapping and obstacle avoidance.
Strong drive and payload capability: torque gear motors provide the torque needed for rough terrain and for carrying sensors or a robotic arm.
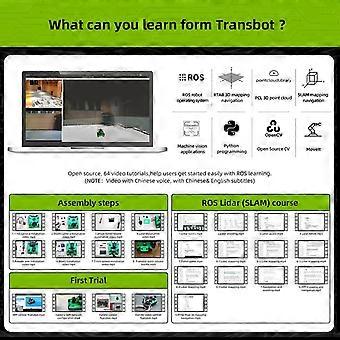
Developmentready platform: Full Python and ROS integration with Rviz, MoveIt, and Qt toolboxes supports simulation, motion planning, and GUI control.
Flexible control options: Operate the robot from a mobile app, a handle controller for FPV driving, or through JupyterLab for online programming and experiments.
Modular hardware: The expansion board simplifies adding manipulators, extra sensors, or custom electronics without redesigning the base.
Notable features
Chassis material: green aluminum alloy oxide finish for a balance of durability and low weight.
Perception: SLAM lidar plus HD camera and depth camera for simultaneous mapping, object detection, and depthaware control.
Actuation: torque gear motors for reliable traction and precise motion control.
Control electronics: Powerful robot expansion board for sensor integration, motor control, and realtime processing.
Software and tools: Native support for ROS, Python, Rviz, MoveIt, and Qt for seamless transition from simulation to physical tests.
Multiinterface operation: Mobile app control, handle control for firstpersonview operation, and JupyterLab for interactive programming.
Practical use scenarios
Indoor mapping and facility inspection: Perform roomscale SLAM mapping to locate obstacles, inspect equipment, and generate floorplans using lidar and camera data.
Robotics education and research: Use ROS, Rviz, and MoveIt to teach motion planning, perception, and control, then validate algorithms on the physical crawler.
Remote exploration and teleoperation: Use the mobile app or handle controller for FPV inspections in confined, hardtoreach, or hazardous areas where a small crawler is preferable to larger vehicles.
Compatibility and development notes
Supports Python and ROS workflows with Rviz and MoveIt for visualization and motion planning, and Qt toolboxes for custom GUIs.
JupyterLab compatibility enables interactive coding, data logging, and rapid prototyping.
Expansion board allows direct integration of additional sensors, arms, or I O modules for custom projects.
What makes it stand out
Combines a professional sensor suite with a rugged, compact crawler platform and developerfriendly software support.
Designed to shorten the gap between simulation and field testing, making it suitable for engineers, researchers, and advanced hobbyists who need a practical, extensible robot platform.
Specifications summary
Chassis: green aluminum alloy oxide
Perception: SLAM lidar, HD camera, depth camera
Actuators: torque gear motors
Control board: powerful robot expansion board
Software: Python and ROS support with Rviz, MoveIt, and Qt toolboxes
Control modes: mobile app, handle control for FPV, JupyterLab online programming
This robot crawler tank is a practical, flexible platform for autonomous navigation, sensor development, and handson robotics projects.
-
Fruugo ID:
462967983-974190724
-
EAN:
6091977684861