説明
AI Robot Tank Kit with Lidar for ROS Python Programming, SLAM Mapping and AllTerrain Mobility
Product overview
A durable crawler robot built for development, research, and handson applications. The chassis uses green aluminum alloy oxide for a sturdy, lightweight platform. The vehicle combines advanced sensing, drive power, and developerfriendly control to accelerate mapping, autonomy, and remote operation projects.
Key benefits
Reliable mobility and protection: Crawler design with torque gear motors delivers stable traction and precise motion over varied surfaces.
Accurate perception and mapping: Integrated SLAM lidar plus HD and depth cameras enable realtime environment mapping, obstacle detection, and depthaware vision.
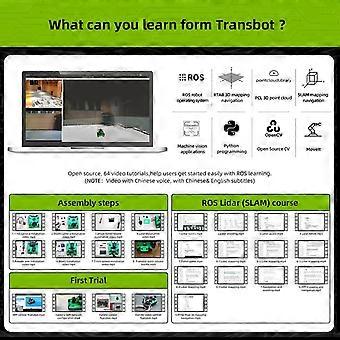
Ready for development and simulation: Native Python and ROS support with Rviz, MoveIt, and Qt toolboxes allows seamless transition from simulation to realworld testing.
Flexible expansion and control: A powerful robot expansion board provides onboard processing and I O, and crossplatform interfaces support mobile app control, handheld FPVstyle operation, or JupyterLab online programming.
Time savings for teams: Preintegrated hardware and software stack reduces setup time so you can focus on algorithms, tasks, and validation.
Features and specifications
Frame material: green aluminum alloy oxide finish for corrosion resistance and lightweight rigidity.
Locomotion: Crawler chassis driven by torque gear motors for dependable propulsion and controlled maneuvering.
Sensing suite: SLAM lidar for simultaneous localization and mapping, plus HD camera and depth camera for visual and depth perception.
Expansion and control board: powerful robot expansion board provided for sensor and actuator integration and onboard processing.
Software compatibility: Full support for Python and ROS toolchains, including Rviz for visualization, MoveIt for motion planning, and Qt toolboxes for custom interfaces.
Control modes: Mobile app remote control, handheld controller support for firstpersonview operation, and JupyterLab for online programming and experimentation.
Why you need this robot
Build and validate autonomous navigation quickly using integrated SLAM and visualdepth sensing.
Reduce integration work with prewired expansion board and ROSready toolchain.
Test algorithms in simulation and deploy to hardware without rework thanks to Rviz and MoveIt compatibility.
Operate and demonstrate remotely using mobile app or handheld FPV control while developers iterate via JupyterLab.
Typical applications
Robotics research and curriculum: Teach perception, SLAM, motion planning, and control using a hardware platform that mirrors ROS simulation environments.
Site mapping and inspection: Create detailed maps and perform visualdepth inspections in structured indoor areas or semistructured outdoor sites.
Prototype development and validation: Rapidly prototype navigation algorithms, integrate additional sensors or manipulators, and validate behavior on a robust crawler base.
Compatibility and integration notes
Designed for ROS and Python development workflows and compatible with standard ROS toolboxes for visualization and motion planning.
Expansion board supports sensor and actuator integration for custom payloads and additional modules.
Multiple control pathways let teams choose remote app control, handheld FPV operation, or codedriven control through JupyterLab.
What makes this product stand out
Purposebuilt crawler platform that pairs rugged, lightweight construction with a complete sensing suite.
Outofthebox ROS and Python readiness reduces setup time and simplifies the path from simulation to realworld experiments.
Multiple control and development interfaces support both nonprogrammer operation and advanced developer workflows.
If your project requires a compact, durable crawler with integrated mapping sensors, robust drive motors, and a developerfriendly software stack, this robot provides a practical, readytouse base for experimentation, education, and field testing.
-
Fruugo ID:
460141931-968526099
-
EAN:
6119562018294