説明
Programmable AI Robot Dog Kit with Advanced AI Vision Control, ROS Compatible Quadruped for Learning
Style: Advanced Kit
Step into advanced robotics with the AI Vision Quadruped Robot. Designed for hobbyists, students, and developers, this programmable robot dog combines firstperson AI vision, flexible leg linkage, and a ROS based development platform to deliver a practical handson learning and prototyping tool.
Key benefits
Learn by doing: A ROS based platform provides a realworld environment for studying machine vision, robot kinematics, motion planning, and control systems.
See and react: Firstperson vision enables tasks such as target tracking, face detection, and line following, making visiondriven behaviors easy to develop and test.
Move with purpose: The advanced linkage mechanism in the legs supports a wide range of motions, from steady walking to negotiating uneven terrain, letting users explore gait design and stability control.
Open and extensible: Built as an educational kit, it supports experimentation, algorithm testing, and iterative improvement of AI and robotics projects.
Engaging and practical: Combines entertaining interaction with meaningful technical learning to accelerate skill development.
Main features
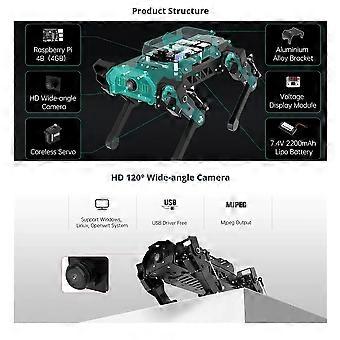
AI powered firstperson vision for perception driven behaviors and experiments.
Advanced multijoint leg linkage for varied movement patterns and terrain adaptation.
ROS based software environment for compatibility with standard robotics workflows and for integration into research and coursework.
Compact kit format targeted at hobbyists and learners for handson assembly and .
Who this is for
Students and instructors seeking a practical platform to teach or learn machine vision, control theory, and robot kinematics.
Hobbyists and makers who want a programmable robot dog to prototype algorithms and test behaviors in a physical system.
Developers and researchers looking for an accessible quadruped to validate perception and locomotion concepts.
Use scenarios
Classroom lab: Use the robot as a teaching aid for projects on visual object tracking, simultaneous localization and mapping, or gait optimization exercises using ROS curricula.
Algorithm prototyping: Validate face detection, target tracking, or line following algorithms in a physical environment before scaling to larger systems.
Field testing and demonstrations: Develop and demo locomotion strategies for uneven surfaces, obstacle negotiation, and autonomous navigation behaviors.
What sets it apart
The combination of firstperson AI vision and fully articulated leg linkage provides a realistic platform for endtoend perception to motion experiments.
A ROS based architecture makes it straightforward to use existing tools, build custom nodes, and integrate with common robotics workflows without starting from scratch.
The Advanced Kit format encourages handson learning, , and iterative development suitable for coursework, hobby projects, and earlystage research.
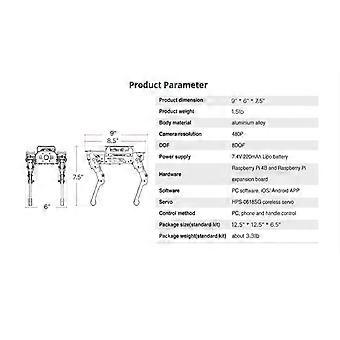
Specifications and compatibility
Functionality includes firstperson vision, target tracking, face detection, line following, and multiple gait modes enabled by an advanced leg linkage.
Software platform is ROS based for compatibility with typical robotics development environments and tools.
Designed as an educational and prototyping kit for desktop and lab use.
The AI Vision Quadruped Robot is a practical, programmable platform for learning and exploring AI driven perception and quadruped locomotion in a compact kit format.
-
Fruugo ID:
462970416-974193329
-
EAN:
6091977427031