説明
ROS Robot Tank Kit with SLAM Lidar Navigation, HD Depth Vision and Python ROS Integration
Robust crawler chassis built from green aluminum alloy oxide for durability and low weight
Stable tracked design for smooth movement over uneven surfaces and tight turns
Corrosionresistant finish for longterm use in indoor and light outdoor environments
Precision sensing and perception for reliable autonomy
SLAM lidar provides realtime mapping and accurate localization for autonomous navigation
HD camera and depth camera deliver quality visual and depth data for obstacle detection, target tracking, and scene understanding
performance actuation and control hardware
torque gear motors deliver strong, controllable drive power for pushing, climbing small inclines, and precise maneuvers
Powerful robot expansion board supports multiple sensors, cameras, and actuators for and extension
Developerfriendly software and interfaces
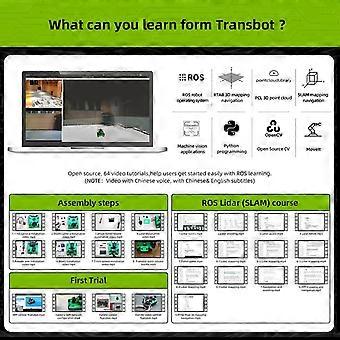
Native support for ROS with visualization and motion toolboxes including RViz, MoveIt, and Qt for simulation, motion planning, and GUI development
Pythoncompatible APIs and examples enable rapid prototyping and algorithm development
JupyterLab online programming support for interactive experimentation and data analysis
Flexible, crossplatform control options
Mobile app control for quick manual operation and situational awareness
Handheld controller support for firstperson view operation and intuitive driving
Remote programming and telemetry via JupyterLab for automated tasks and research workflows
Why this robot tank matters
Solves navigation and perception challenges by combining SLAM lidar with HD and depth cameras for dependable mapping and obstacle avoidance
Reduces development time with ready ROS integration and Python tooling, so researchers and developers can focus on algorithms instead of lowlevel integration
Scales to multiple applications because the expansion board and modular hardware make it easy to add manipulators, additional sensors, or custom payloads
Key specifications and attributes
Chassis material: green aluminum alloy oxide
Drive: tracked crawler design with torque gear motors
Sensing: SLAM lidar, HD camera, depth camera
Control electronics: performance robot expansion board compatible with common ROS workflows
Software: ROS integration with RViz, MoveIt, Qt toolboxes; Python and JupyterLab support
Control interfaces: mobile app, handheld controller, and remote programming
Practical use scenarios
1) Autonomous inspection and mapping: Deploy indoors for facility mapping and routine inspection, using SLAM lidar and cameras to generate accurate maps while avoiding obstacles. Manual override via mobile app or handheld controller when needed.
2) Research and development: Use ROS, RViz, MoveIt, and Python to develop and test navigation, perception, and manipulation algorithms. JupyterLab enables dataset analysis and online tuning.
3) Education and prototyping: Provide students and makers with a durable, extensible platform for learning robotics concepts, building custom sensor suites, and experimenting with autonomous behaviors.
What makes this product stand out
Integrated perception stack combines lidar and stereo depth for robust mapping and obstacle handling
Developerfocused software stack reduces integration work and accelerates testing
Modular hardware and expansion board enable straightforward for specific tasks
This robot tank is suited for developers, researchers, educators, and integrators who need a durable, extensible platform with strong sensing, reliable drive performance, and full compatibility with ROS and Python development workflows.
-
Fruugo ID:
460148048-968532497
-
EAN:
6119562008103